DuckieBot: Autonomous Robot Navigation
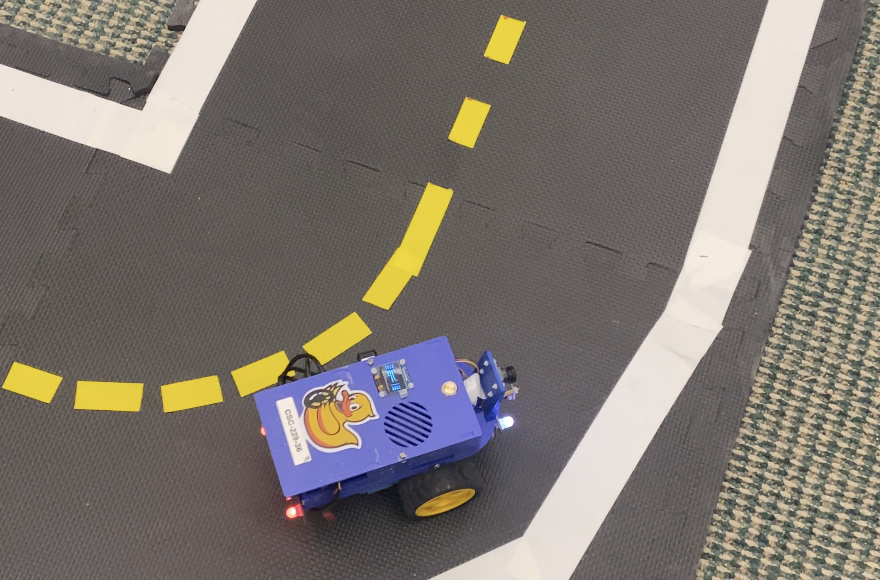
Duckiebots are small, affordable differential-drive robots built on a Raspberry Pi, designed for autonomous driving research and education. I worked on this as part of CMPUT 503 — a hands-on robotics course covering perception, control, and systems integration.
I built and deployed ROS nodes on real hardware: starting with low-level wheel encoder odometry to drive precise distances and rotations, then layering in computer vision for colour-based line detection and HSV-tuned lane boundary tracking. I implemented and compared P, PD, and PID controllers for lane following, ultimately achieving stable full-circle autonomous navigation using a P controller with real-time camera feedback.
Kinematics
- Traced a “D”-shaped path with LED state signalling across three motion phases [video]
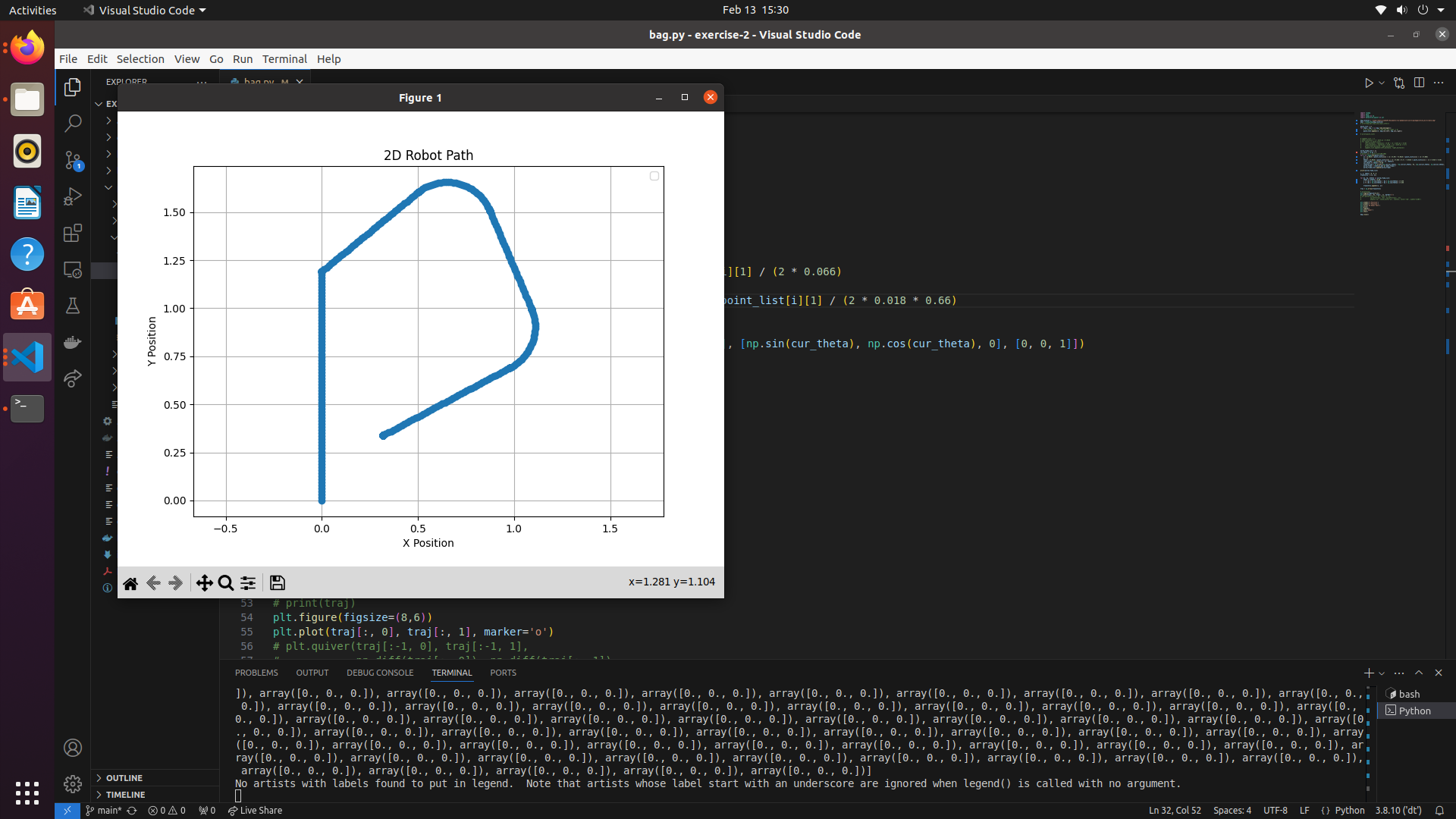
- Recorded and plotted odometry from ROS bags to analyze real vs. intended trajectory
Demos: Reverse parking · Drive square
Computer Vision & Lane Following
- Corrected lens distortion using intrinsic camera calibration parameters with OpenCV
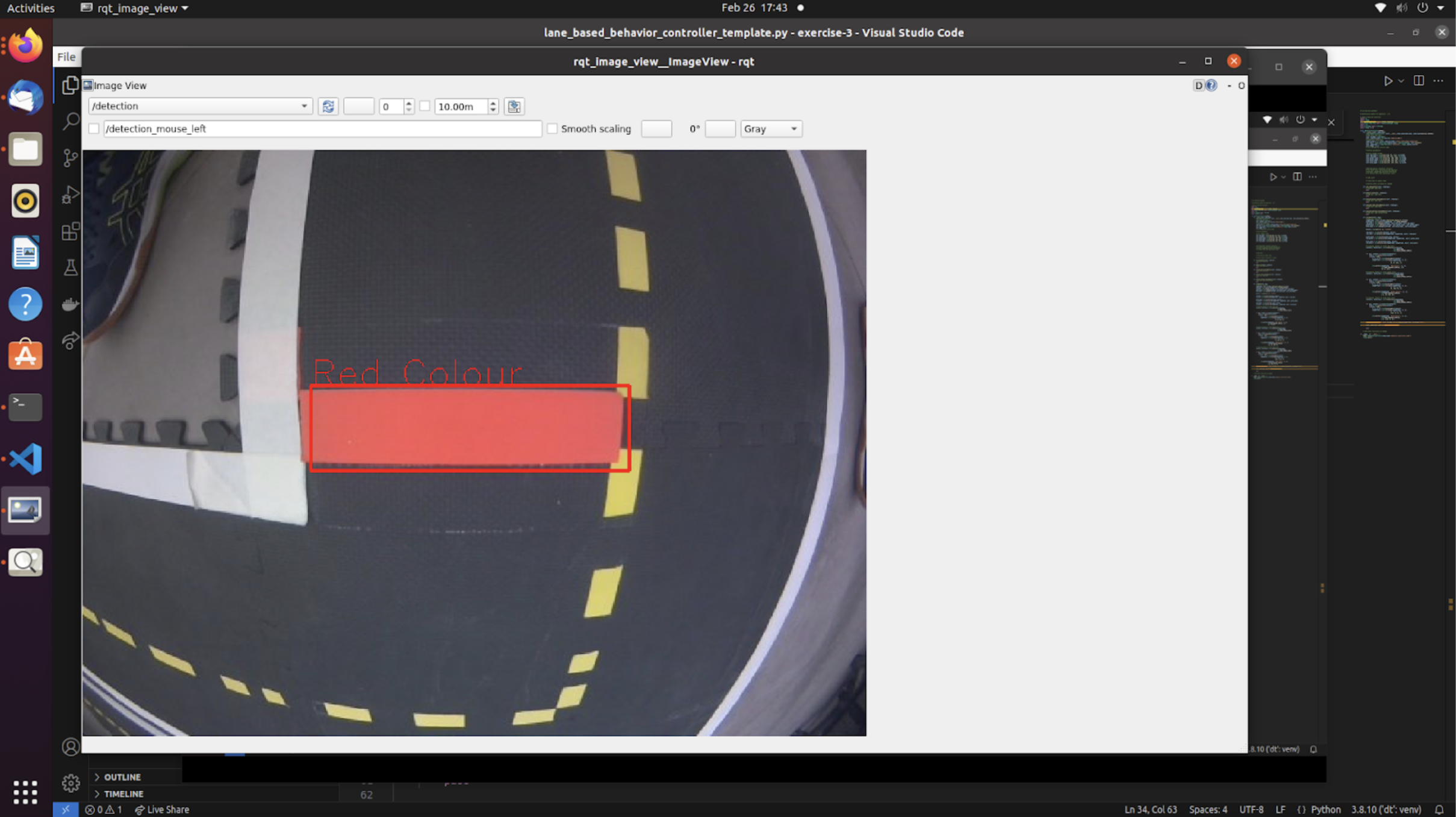
- Detected red, blue, and green lines in real-time using HSV masking and contour extraction, triggering distinct robot behaviours per colour [red] · [green] · [blue]
- Implemented P, PD, and PID controllers for lane following; P alone proved most effective given rapid camera feedback [P] · [PD] · [PID]
- Achieved full-circle autonomous lane following with throttle clipping and fallback reference handling for lost lane markers [video]
Collaboration: Alex Liu & Minh Pham.